Historia de los robots.
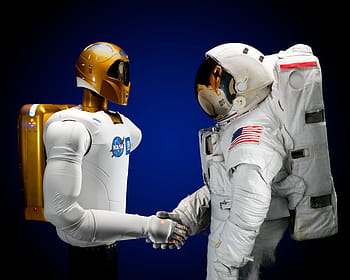
“La historia de los robots tiene sus orígenes en el mundo antiguo. El concepto moderno comenzó a desarrollarse con el inicio de la Revolución Industrial, que permitió el uso de mecánicos complejos y la posterior introducción de electricidad. Esto hizo posible alimentar máquinas con pequeños motores compactos. A principios del siglo XX, se desarrolló la noción de una máquina humanoide.”
“Los primeros usos de robots modernos fueron en fábricas como robots industriales: máquinas fijas simples capaces de realizar tareas que permitían la producción con menos necesidad de asistencia humana. Robots industriales controlados digitalmente y robots que utilizan inteligencia artificial se han construido desde la década de 2000.”
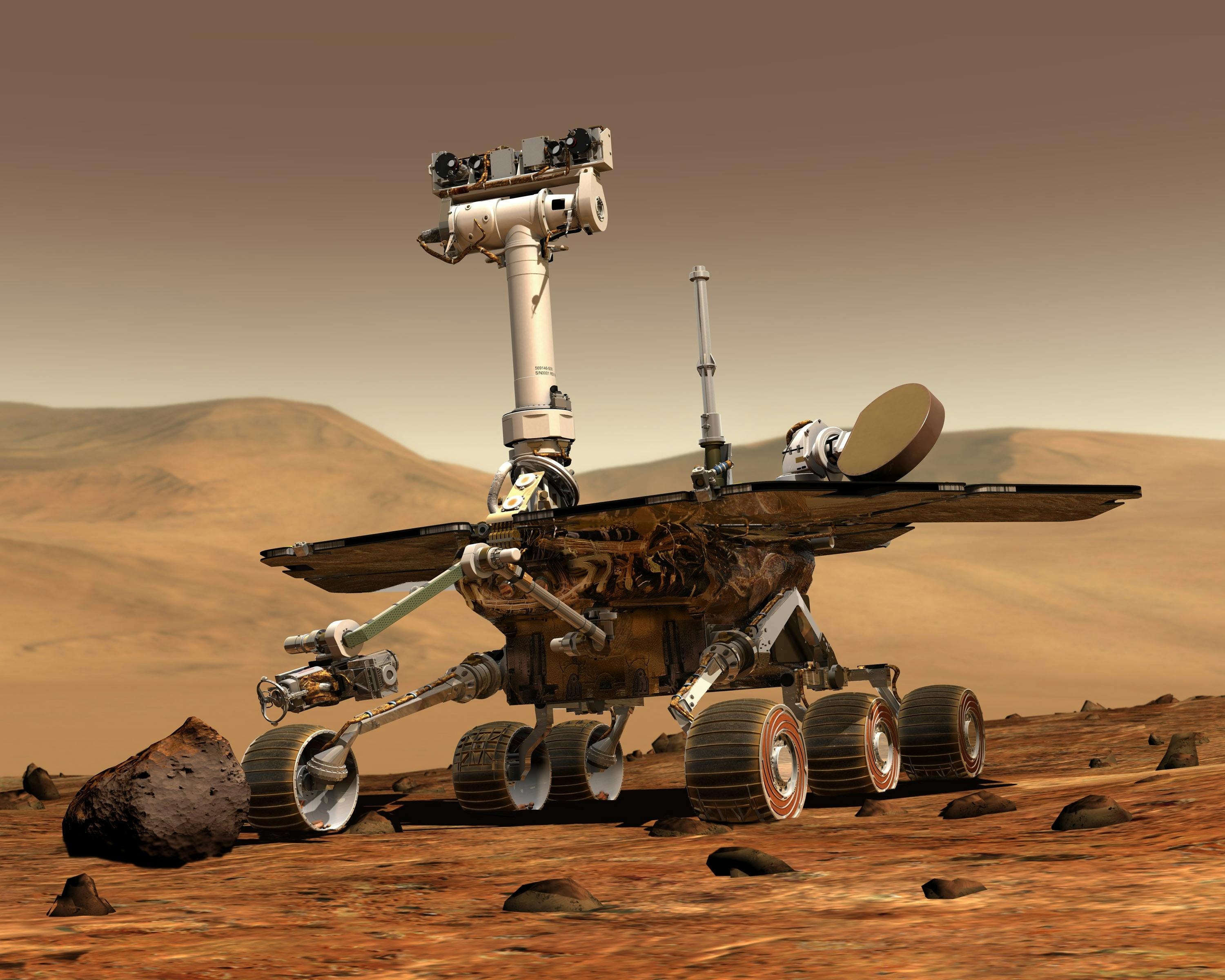
“Los robots comerciales e industriales están ahora en uso generalizado realizando trabajos más baratos o con mayor precisión y confiabilidad que los humanos. También se emplean para tareas que son demasiado sucias, peligrosas o aburridas para que sean adecuadas para los humanos. Los robots se utilizan ampliamente en la fabricación, el ensamblaje y el embalaje, el transporte, la exploración de la Tierra y el espacio, la cirugía, el armamento, la investigación de laboratorio y la producción en masa de bienes de consumo e industriales.”
hisour



Comentarios
Publicar un comentario